

... or ...
Request your offer now!
Includes everything you need to start programming quadrocopters ...

With the flight module you have everything you need to take off with QCS ...

A number of expansion modules for the autonomous drone ...
Includes everything you need to start programming quadrocopters ...
With the flight module you have everything you need to take off with QCS...
A number of expansion modules for the autonomous drone ...
The Quadrotor Control System (QCS) is a flexible teaching and development system for quadrocopter programming.The QCS is available as a complete package with everything you need to get started:
QCS has already been used in teaching for some years now and fascinates lecturers, teachers, students and pupils equally by allowing the teaching and understanding of the subject matter in exciting and practical way.
Contents from the following subjects/areas are treated: informatics, technology, mechatronics, control engineering, information technology and electrical engineering as well as real-time systems and autonomous systems.
There are four ways of working with the QCS-Qopter
A wide range learning content is available, which contains basic knowledge and further information in theory and practice with tasks and solutions covering the following subjects.
Beyond the pure development in the workplace, the extension of QCS, the Quadrotor Control System - Flying (QCS-F) offers all the freedom for development of drone technology in flight. With QCS-F you receive additional equipment in order to implement different flight missions and to let the drone handle a task autonomously in flight. The open software framework of the QCS / QCS-F offers a great variety of possibilities for integration of individual sensors and intelligent functionality. There are virtually no limits to your creativity!
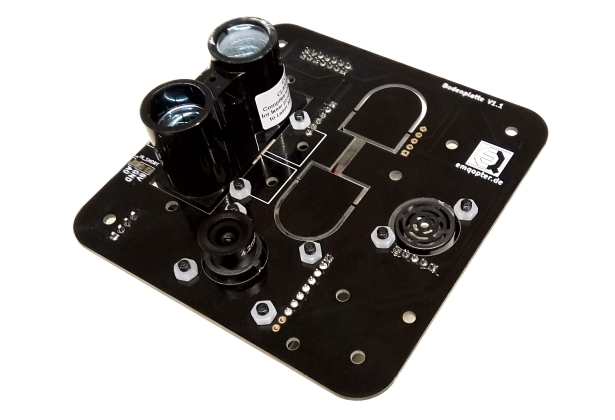
For the Quadrotor Control System – Flying (QCS-F) we offer a large number of useful add-ons, by which you can start with the development of your ideas in this interesting and important sector in the future. Each add-on contains hardware components and open software implementation for the rapid entry into the development process.

More power for higher payloads.

The personalised cover for your QCS.

For even more security and stability

Powerful computing performance and storage capacity

Maximum security during development
Personalised case-labelling with logo

Real-time communication via Bluetooth

Second remote control for simultaneous control

Position determination for outdoor missions

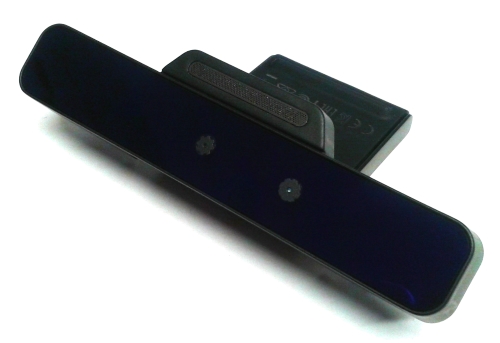
Simple 2D detection of the movement of QCS-F

Robust 4D detection of the movement of QCS-F*

Frontal camera for object recognition*

Swiveling camera for object recognition*

Barometer, infrared, ultrasoundfor flight height determination

Laser, barometer and ultrasoundfor flight height determination

Frontal camera with analog video transmission

Videolink Basic with swiveling camera

Swiveling camera with digital video transmission

Module with 3 ultrasound distance sensors

4 modules with 3 ultrasound distance sensors each

Sensor module with 8 1,5m infrared distance sensors

Sensor module with 8 5m infrared distance sensors

Sensor module with 2 40m laser distance sensors

Sensor module with 8 40m laser distance sensors

8 5m infrared and 12 ultrasound distance sensors

8 1,5m infrared and 12 ultrasound distance sensors

8 40m laser and 12 ultrasound distance sensors
3D ToF Intel® RealSense™ obstacle detection

3D ToF PMD obstacle detection
Stereo optical obstacle detection
The QCS / QCS-F comes with complete software framework in order to enable modular implementation of add-ons. In this context, the user is given sample opportunities to adapt and reimplement relevant functions. The software framework is ideally suited for integration of individual teaching content and for development of own solutions for advanced questions. Appropriate code samples are also available as a solution in the QCS course contents.
The Quadrotor Control System was optimized in the practical application of teaching. This has led to practice-related methods, concepts and tutorials, which make the teaching in the field of drone technology even more versatile than one can already expect considering the topic itself. The content of teaching is divided into 10 chapters and covers methods and concepts from the theory of basic signal processing up to the practice of autonomous quadrocopter. The content of teaching is in the form of Power Point presentations available. Various chapters cover the following topics:
Communication is an essential element for the implementation of programs for distributed systems. All data transmission between QCS and ground station as well as the position regulation are implemented by the user, which is why an introduction will be given in this chapter.
The remote control of QCS takes place via AVR microcontroller, which is programmed in C. This section deals with the introduction into the AVR development framework.
For the regulation of QCS is sensor technology necessary, which captures the current orientation of the system regarding the three spatial axes. In this section controlling and reading out the sensor technology will be implemented.
The efficient processing of sensor data is significant for later use for functioning position regulation of QCS quadrocopter. For this purpose quaternions will be used, whose implementation is explained in this learning section.
Telemetry is transmission of system information to the ground station in real time. In this chapter graphical ground station software as well as communication protocol will be developed, in order to make the QCS sensor data clear in a vivid way for the user.
Telecommands are used for transmitting commands to a system. This section deals with the implementation of telecommands from the ground station software to the QCS.
For the position regulation of a quadrocopter several controllers must be implemented. This chapter explains the working principle of the PID controllers and is dealing with implementation of roll and pitch axes regulation of QCS quadrocopter.
This chapter discusses the regulation of the yaw axis along with roll and pitch axes to ensure the stable functioning of the attitude control of a quadrocopter. In this respect a number of special features will be addressed in contrast to the regulation of the two horizontal axes.
Finally, the various controllers will be super-positioned, in order to ensure the controlling of QCS quadrocopter around the three spatial axes simultaneously. The problematic nature of this work step is discussed in this chapter.
Autonomy is one of the main objectives for the development of robot systems. In the last chapter lays the foundation for further development with QCS, in order to allow the system handle tasks independently.
QCS / QCS-F is designed as complete system for an optimum entry into programming and development of drones. For this purpose, the QCS software framework is documented and explained in detail for further work by the user.
We would be glad to put our experience and knowledge at your disposal to provide a better understanding and to answer all your questions around the topics development of drones and the use of QCS in teaching and research. The assenbly of the QCS / QCS-F is also explained in detail on our YouTube channel!
If there are still any questions considering assembly and introduction in the work with QCS, we will be glad to visit and help you get started with the set-up directly at your workplace!
Please do not hesitate to contact us in case of questions and special wishes! We are looking forward to hear from you!



Copyright © 2023 | Emqopter GmbH | Impressum | Privacy Policy | Conditions of Use