NEWS
Die Grundlagen des Kalman Filters - Jetzt mehr erfahren!
Social MediaDrone-Tech-AcademyQCSKalman-FilterembeddedFolge 6: Kalman-Filter 1/2
Ähnlich wie beim Radio kann es auch bei Flugsensoren durch die Umgebung zu Signalstörungen, also einem Rauschen, kommen. Um ein solches Rauschen zu senken, müssen mathematisch erfasste Algorithmen, auch Filter genannt, angewendet werden. In unserer 6. Folge der #DroneTechAcademy, stellt Dr. Gageik, Geschäftsführer (techn.), das weit verbreitete Kalman-Filter vor. Ein Algorithmus, den schon die NASA bei der ersten Mondlandung verwendet hat.
Folgen Sie diesem Link und erfahren Sie, wie der Kalman-Filter sich der Rauschänderung anpasst und so Echtzeitmessungen ermöglicht.
Sie wollen keine Updates rund um Emqopter mehr verpassen? Abonnieren Sie für regelmäßigen #Drohnen-Content einfach unseren Youtube Kanal!

Die neue Folge zum Kalman Filter ist jetzt auf YouTube verfügbar!

Dr. Nils Gageik erklärt die Grundlagen der Kalman Filtergleichungen
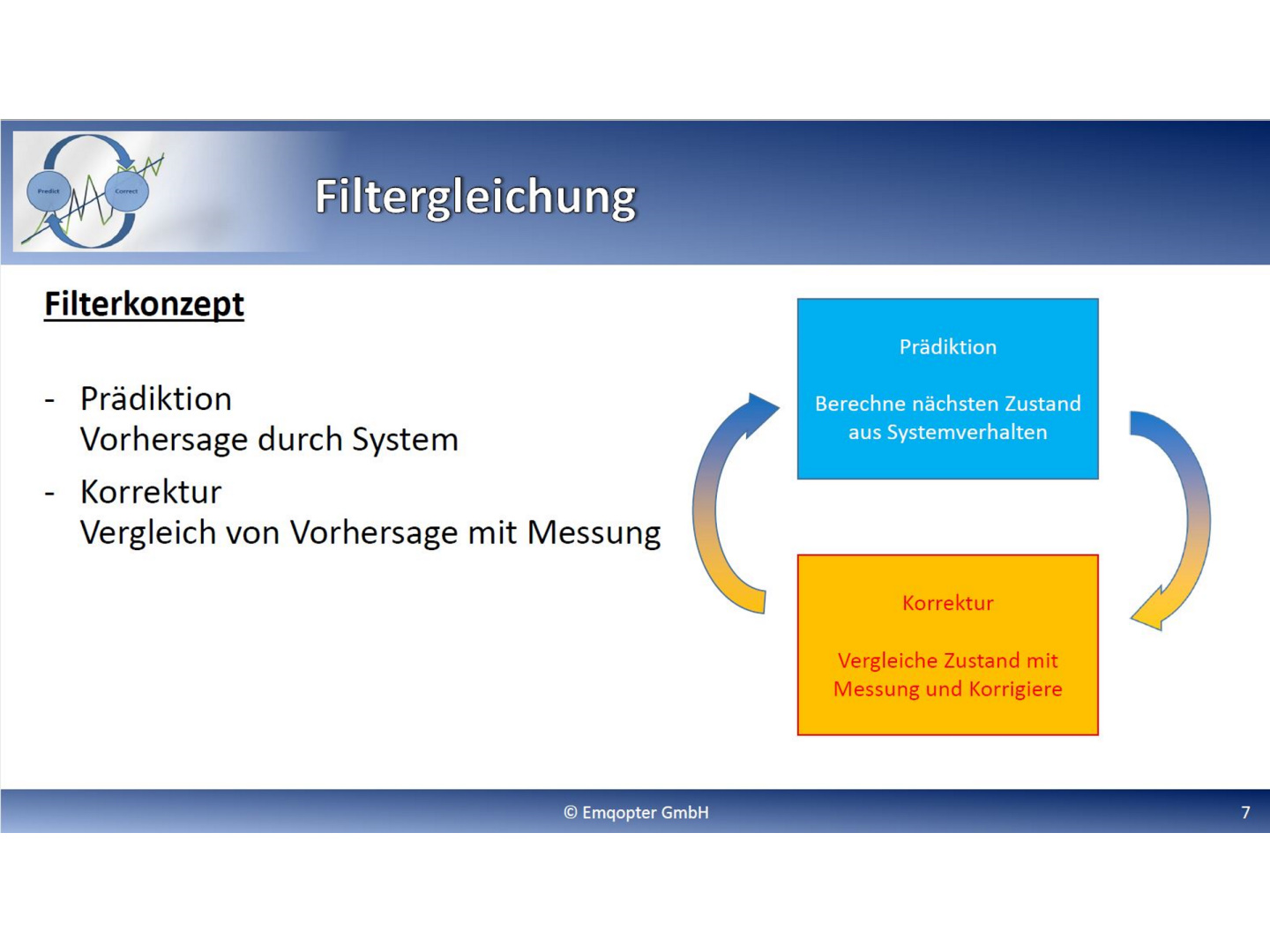
Im Video wird die Funktion des Filters anschaulich erklärt.
Verwandte News:

QCS Quickstart Folge 2
Der zweite Teil unserer QCS(F) Quick Start Serie jetzt auf YouTube!

Drone Tech Academy Event 2025
Erleben Sie Drohnentechnologie zum Anfassen bei uns in Würzburg!

QCS(F) Quick Start Serie gestartet
Der erste Teil unserer QCS(F) Quick Start Serie jetzt auf YouTube!


