NEWS
Beispielimplementierung des Kalman-Filters
Social MediaDrone-Tech-AcademyQCSKalman-FilterembeddedFolge 7: Kalman-Filter 2/2
Sie sind in der letzten Folge unserer Drone Tech Academy zu den Grundlagen des Kalman-Filters bis zum Ende dran geblieben und jetzt gespannt, wie ein Kalman-Filter in Software implementiert wird? Dann geht’s jetzt ans Eingemachte. In der neuesten Folge zeigt Dr. Nils Gageik anhand unseres Software-Frameworks EMQ_QCSF, wie der Bias Drift eines Gyroskops kompensiert wird.
Hier gelangen Sie direkt zur neuesten Folge unserer Drone Tech Academy!
Das EMQ_QCSF-Framework ist übrigens eines von fünf unterschiedlich umfangreichen Software-Frameworks, die alle im Produktumfang der Komplettpakete unserer Lehr- und Entwicklungsplattform Quadrotor Control System (QCS) enthalten sind. Vom Anfänger bis zum Profi ist so für jeden was dabei. Ausführliche Informationen finden Sie auf der Produktseite unseres QCS. Ihre kostenlose und unverbindliche Webdemo können Sie hier vereinbaren.
Sie wollen zukünftig keine Folge der Drone Tech Academy verpassen?
Dann abonnieren Sie unseren YouTube-Kanal. Dort finden Sie auch die bisherigen Folgen sowie weitere Videos und Updates rund um das Thema Drohnen und Emqopter.

Dr. Nils Gageik hält einen Sensor in der Hand und erklärt wie das Kalman-Filter implementiert wird
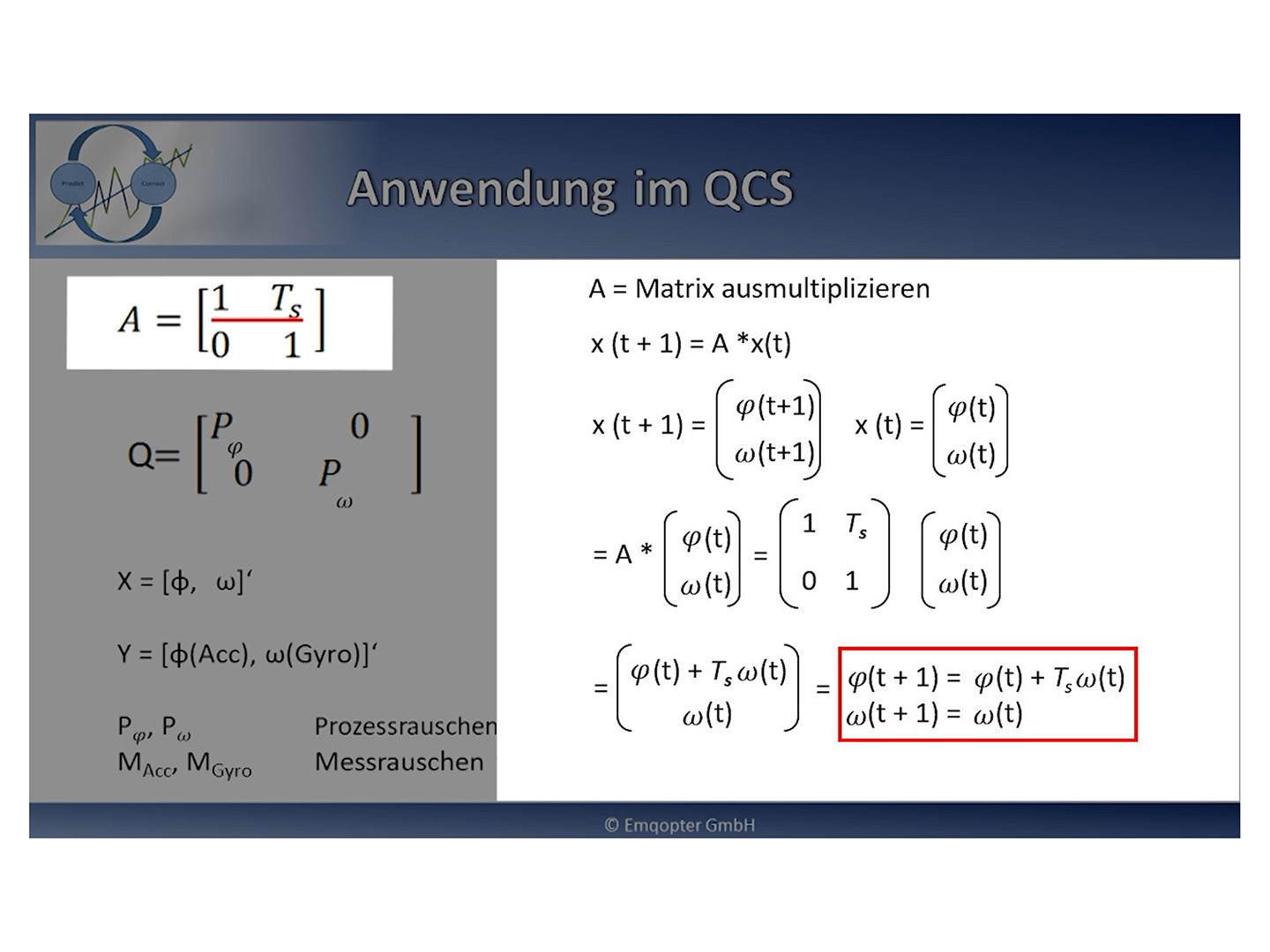
Im Video geht Emqopter-Gründer Dr. Nils Gageik auf die Herleitung ein

Dr. Nils Gageik hält eine Drohne in der Hand.
Verwandte News:

QCS Quickstart Folge 2
Der zweite Teil unserer QCS(F) Quick Start Serie jetzt auf YouTube!

Drone Tech Academy Event 2025
Erleben Sie Drohnentechnologie zum Anfassen bei uns in Würzburg!

QCS(F) Quick Start Serie gestartet
Der erste Teil unserer QCS(F) Quick Start Serie jetzt auf YouTube!


